
摘要:现代飞行器控制中采用了多种先进的控制方法,包括自适应控制、鲁棒控制、智能控制等。这些方法能够实现对飞行器的精确控制,提高飞行器的性能和稳定性。自适应控制能够自动调整控制系统参数以适应环境变化,鲁棒控制则能够在存在干扰的情况下保持系统的稳定性。智能控制方法则结合了人工智能和自动控制理论,实现了对飞行器更高级别的智能化控制。这些现代控制方法的应用,极大地提升了飞行器的性能和安全性能。
本文目录导读:
随着科技的飞速发展,飞行器控制技术在航空领域起到了至关重要的作用,现代控制方法在飞行器控制中的应用,大大提高了飞行器的性能、稳定性和安全性,本文将详细介绍飞行器控制上用到的主要现代控制方法。
现代控制方法概述
现代控制方法主要涵盖了自动控制理论、智能控制、鲁棒控制等多个方面,这些方法在飞行器控制中的应用,使得飞行器能够在复杂环境下实现精确飞行、自主导航、智能避障等功能。
现代控制方法在飞行器控制中的应用
1、自动驾驶技术
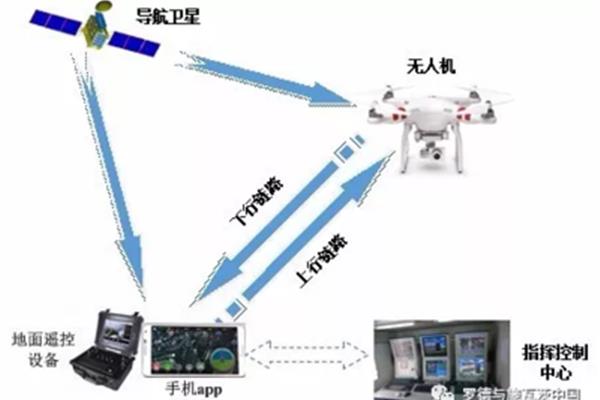
自动驾驶技术是飞行器控制中应用最广泛的现代控制方法之一,通过GPS、惯性测量单元(IMU)、传感器等设备,实现对飞行器的自动导航、飞行姿态控制、高度控制等功能,自动驾驶技术主要依赖于自动控制理论,包括PID控制、模糊控制等。
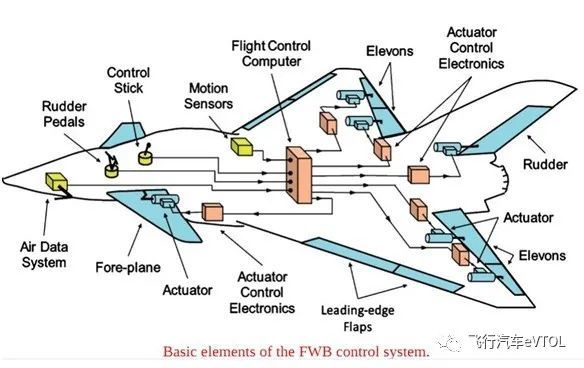
2、飞行控制系统
飞行控制系统是飞行器的核心部分,负责实现飞行器的起飞、巡航、着陆等各个阶段的控制,现代飞行控制系统主要采用了鲁棒控制理论,以提高系统在外部干扰和内部参数变化下的性能稳定性,飞行控制系统还结合了智能控制方法,如神经网络、遗传算法等,实现对飞行器的智能优化控制。
3、传感器融合技术
传感器融合技术是现代飞行器控制中的关键技术之一,通过融合多种传感器的数据,实现对飞行器状态的高精度感知和预测,传感器融合技术主要依赖于数据融合算法和滤波技术,如卡尔曼滤波、粒子滤波等。
4、自主避障技术
自主避障技术是保障飞行器安全的重要技术之一,通过雷达、激光雷达等设备,实现对周围环境的实时监测和避障,自主避障技术主要依赖于计算机视觉和人工智能算法,如深度学习、机器学习等。
现代控制方法的优势与挑战
现代控制方法在飞行器控制中的应用,带来了诸多优势,如提高飞行性能、增强稳定性、提高安全性等,现代控制方法也面临着一些挑战,如算法复杂性、实时性要求、安全性保障等,随着无人机的快速发展,如何在保证安全的前提下实现无人机的智能化、自主化控制,也是现代飞行器控制面临的重要挑战。
未来展望
随着科技的不断发展,现代控制方法在飞行器控制中的应用将更加广泛,随着人工智能、大数据等技术的不断发展,现代飞行器控制将实现更高的智能化、自主化水平,随着新型材料、新能源等技术的不断发展,现代飞行器控制的性能将进一步提高,随着无人机市场的不断扩大,无人机控制将成为未来飞行器控制的重要研究方向。

现代控制方法在飞行器控制中的应用,大大提高了飞行器的性能、稳定性和安全性,自动驾驶技术、飞行控制系统、传感器融合技术和自主避障技术等现代控制方法的应用,使得飞行器能够在复杂环境下实现精确飞行、自主导航、智能避障等功能,现代控制方法也面临着一些挑战,如算法复杂性、实时性要求、安全性保障等,随着科技的不断发展,现代飞行器控制将实现更高的智能化、自主化水平。
 京公网安备11000000000001号
京公网安备11000000000001号 豫ICP备2020027693号-1
豫ICP备2020027693号-1